Creates a Node object Creates a Node object for use with path finding.
More...
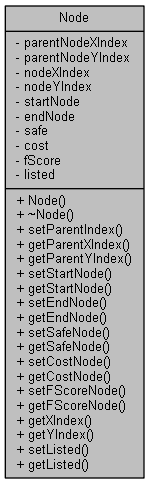
#include <node.h>
Creates a Node object Creates a Node object for use with path finding.
| Node::Node |
( |
int |
nodeXIndex, |
|
|
int |
nodeYIndex |
|
) |
| |
Constructs a Node object
- Parameters
-
| int Node::getCostNode |
( |
| ) |
|
Getter # Get the cost
- Returns
- int The cost to move to the node
| bool Node::getEndNode |
( |
| ) |
|
Getter # Get If the node is an endNode
- Returns
- bool If the node is an endNode
| int Node::getFScoreNode |
( |
| ) |
|
Getter # Get the fScore
- Returns
- int The fScore to of the node
Getter # Get the value of listed
- Returns
- bool If the node is listed
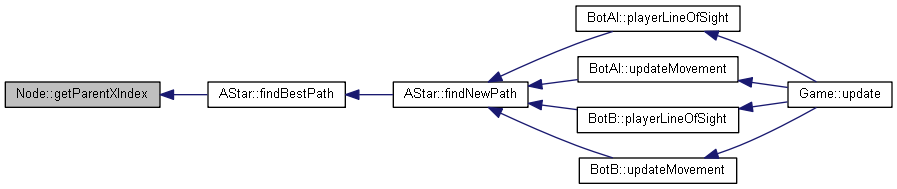
| int Node::getParentXIndex |
( |
| ) |
|
Getter # Get the parentNode X index
- Returns
- int The X index of the parentNode
| int Node::getParentYIndex |
( |
| ) |
|
Getter # Get the parentNode Y index
- Returns
- int The Y index of the parentNode
| bool Node::getSafeNode |
( |
| ) |
|
Getter # Get If the node is safe
- Returns
- bool If the node is safe
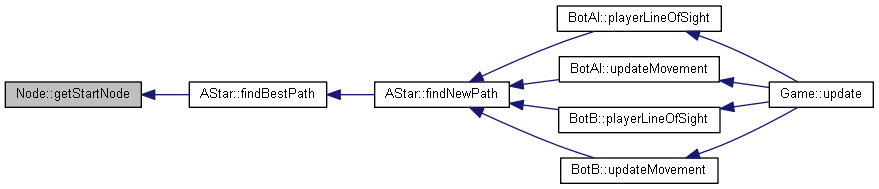
| bool Node::getStartNode |
( |
| ) |
|
Getter # Get If the node is a startNode
- Returns
- bool If the node is a startNode
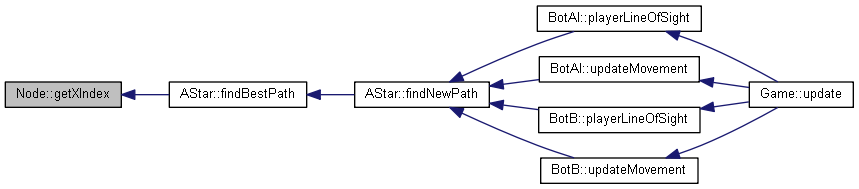
Getter # Get the x index
- Returns
- int The x index of the node
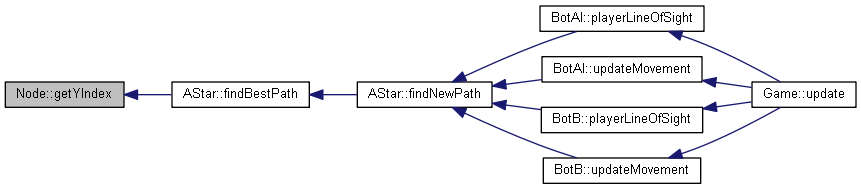
Getter # Get the y index
- Returns
- int The y index of the node
| void Node::setCostNode |
( |
int |
cost | ) |
|
Setter # Set the cost
- Parameters
-
| int | The cost to move to the node |
| void Node::setEndNode |
( |
bool |
endNode | ) |
|
Setter # Set the node
- Parameters
-
| bool | The setting of the node |
| void Node::setFScoreNode |
( |
int |
fScore | ) |
|
Setter # Set the fScore
- Parameters
-
| bool | The fScore to of the node |
| void Node::setListed |
( |
bool |
listed | ) |
|
Setter # Set the value of listed
- Parameters
-
| bool | If the node is listed |
| void Node::setParentIndex |
( |
int |
parentNodeXIndex, |
|
|
int |
parentNodeYIndex |
|
) |
| |
Setter # Set the parentNode index
- Parameters
-
| int | The X index of the parentNode |
| int | The Y index of the parentNode |
| void Node::setSafeNode |
( |
bool |
safe | ) |
|
Setter # Set the node
- Parameters
-
| bool | The setting of the node |
| void Node::setStartNode |
( |
bool |
startNode | ) |
|
Setter # Set the node
- Parameters
-
| bool | The setting of the node |
| int Node::parentNodeXIndex |
|
private |
| int Node::parentNodeYIndex |
|
private |
The documentation for this class was generated from the following files:







 1.8.8
1.8.8

