Contains Collision detection functions for use within the code. More...
Functions | |
| bool | rectRectIntersect (Vec2 posBoxA, Vec2 dimBoxA, Vec2 posBoxB, Vec2 dimBoxB) |
| Checks to see if two rectangles intersect. More... | |
| bool | cubeCubeIntersect (Vec3 posBoxA, Vec3 dimBoxA, Vec3 posBoxB, Vec3 dimBoxB) |
| Checks to see if two cubes intersect (position is the center of the cube) More... | |
| bool | cubeCubeIntersect (Vec3 posBoxA, Vec3 dimBoxA, Vec3 posBoxB, Vec3 dimBoxB, Vec3 &collisionSides) |
| Checks to see if two cubes intersect (position is the center of the cube) More... | |
| bool | sphereCubeIntersect (Vec3 posBox, Vec3 dimBox, Vec3 posSphere, float radSphere) |
| Checks to see if a cube and sphere intersects (position is the center of the cube) More... | |
| bool | sphereCubeIntersect (Vec3 posBox, Vec3 dimBox, Vec3 posSphere, float radSphere, Vec3 &collisionSides) |
| Checks to see if a cube and sphere intersects (position is the center of the cube) More... | |
| bool | circleCircleIntersect (Vec2 circle1Pos, Vec2 circle2Pos, float circle1Rad, float circle2Rad) |
| Takes in two circle positions, radius's to detect if the circles collide. More... | |
| bool | sphereSphereIntersect (Vec3 sphere1Pos, Vec3 sphere2Pos, float sphere1Rad, float sphere2Rad) |
| Takes in two sphere positions and radius's and uses this to detect if the sphere's collide. More... | |
| bool | sphereSphereIntersect (Vec3 sphere1Pos, Vec3 sphere2Pos, float sphere1Rad, float sphere2Rad, Vec3 &vel1, Vec3 &vel2) |
| Takes in two sphere positions and radius's and uses this to detect if the sphere's collide. More... | |
| bool | circleRectIntersect (Vec2 circlePos, Vec2 boxPos, float circleRad, Vec2 boxDim) |
| Takes in a circle position and radius and a box position and dimensions to detect for collision. More... | |
Detailed Description
Contains Collision detection functions for use within the code.
Function Documentation
◆ circleCircleIntersect()
| bool Collision::circleCircleIntersect | ( | Vec2 | circle1Pos, |
| Vec2 | circle2Pos, | ||
| float | circle1Rad, | ||
| float | circle2Rad | ||
| ) |
Takes in two circle positions, radius's to detect if the circles collide.
- Parameters
-
circle1Pos The first circle position's to be used in the collision check. circle2Pos The second circle position's to be used in the collision check. circle1Rad The first circle radius's to be used in the collision check. circle2Rad The second circle radius's to be used in the collision check.
- Returns
- If the collision occurs.

◆ circleRectIntersect()
Takes in a circle position and radius and a box position and dimensions to detect for collision.
- Parameters
-
circlePos The circle's position to be used in the collision check. boxPos The box's position to be used in the collision check. circleRad The sphere's radius to be used in the collision check. boxDim The box's dimension's to be used in the collision check.
- Returns
- If the collision occurs.
◆ cubeCubeIntersect() [1/2]
Checks to see if two cubes intersect (position is the center of the cube)
- Parameters
-
posBoxA The position of the first cube. dimBoxA The dimensions of the first cube. posBoxB The position of the second cube. dimBoxB The dimensions of the second cube.
- Returns
- If the cubes intersect.
◆ cubeCubeIntersect() [2/2]
| bool Collision::cubeCubeIntersect | ( | Vec3 | posBoxA, |
| Vec3 | dimBoxA, | ||
| Vec3 | posBoxB, | ||
| Vec3 | dimBoxB, | ||
| Vec3 & | collisionSides | ||
| ) |
Checks to see if two cubes intersect (position is the center of the cube)
- Parameters
-
posBoxA The position of the first cube. dimBoxA The dimensions of the first cube. posBoxB The position of the second cube. dimBoxB The dimensions of the second cube. collisionSides A reference to the sides of the cubes that collides, eg. x = -1 then left, x = 0 then none, x = 1 then right
- Returns
- If the cubes intersect.
◆ rectRectIntersect()
Checks to see if two rectangles intersect.
- Parameters
-
posBoxA The position of the first rectangle. dimBoxA The dimensions of the first rectangle. posBoxB The position of the second rectangle. dimBoxB The dimensions of the second rectangle.
- Returns
- If the rectangles intersect.
◆ sphereCubeIntersect() [1/2]
Checks to see if a cube and sphere intersects (position is the center of the cube)
- Parameters
-
posBox The position of the cube. dimBox The dimensions of the cube. posSphere The position of the sphere. radSphere The radius of the sphere.
- Returns
- If the cubes intersect.
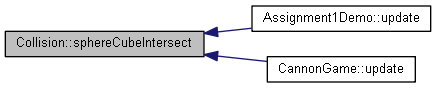
◆ sphereCubeIntersect() [2/2]
| bool Collision::sphereCubeIntersect | ( | Vec3 | posBox, |
| Vec3 | dimBox, | ||
| Vec3 | posSphere, | ||
| float | radSphere, | ||
| Vec3 & | collisionSides | ||
| ) |
Checks to see if a cube and sphere intersects (position is the center of the cube)
- Parameters
-
posBox The position of the cube. dimBox The dimensions of the cube. posSphere The position of the sphere. radSphere The radius of the sphere. collisionSides A reference to the sides of the cubes that collides, eg. x = -1 then left, x = 0 then none, x = 1 then right
- Returns
- If the cubes intersect.
◆ sphereSphereIntersect() [1/2]
| bool Collision::sphereSphereIntersect | ( | Vec3 | sphere1Pos, |
| Vec3 | sphere2Pos, | ||
| float | sphere1Rad, | ||
| float | sphere2Rad | ||
| ) |
Takes in two sphere positions and radius's and uses this to detect if the sphere's collide.
- Parameters
-
sphere1Pos The first sphere position's to be used in the collision check. sphere2Pos The second sphere position's to be used in the collision check. sphere1Rad The first sphere radius's to be used in the collision check. sphere2Rad The second sphere radius's to be used in the collision check.
- Returns
- If the collision occurs.

◆ sphereSphereIntersect() [2/2]
| bool Collision::sphereSphereIntersect | ( | Vec3 | sphere1Pos, |
| Vec3 | sphere2Pos, | ||
| float | sphere1Rad, | ||
| float | sphere2Rad, | ||
| Vec3 & | vel1, | ||
| Vec3 & | vel2 | ||
| ) |
Takes in two sphere positions and radius's and uses this to detect if the sphere's collide.
- Parameters
-
sphere1Pos The first sphere position's to be used in the collision check. sphere2Pos The second sphere position's to be used in the collision check. sphere1Rad The first sphere radius's to be used in the collision check. sphere2Rad The second sphere radius's to be used in the collision check. vel1 A reference to the velocities of the 1st sphere. vel2 A reference to the velocities of the 2nd sphere.
- Returns
- If the collision occurs.