Contains the Quaternion structure with functions and overloaded operators. More...
#include <Quaternion.h>
Collaboration diagram for Quaternion:
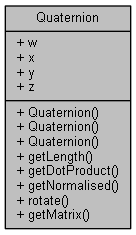
Public Member Functions | |
| Quaternion () | |
| Constructs the Quaternion setting the values to 1,0,0,0. More... | |
| Quaternion (float w, float x, float y, float z) | |
| Constructs the Quaternion setting the values to the input coordinates. More... | |
| Quaternion (int w, int x, int y, int z) | |
| Constructs the Quaternion setting the values to the input coordinates. More... | |
| float | getLength () |
| Returns the length of the Quaternion. More... | |
| float | getDotProduct (Quaternion Qa, Quaternion Qb) |
| Returns the dot product of two Quaternions. More... | |
| Quaternion | getNormalised () |
| Returns the normalised version of the Quaternion. More... | |
| void | rotate (Quaternion &quat, Vec3 axis, float angle) |
| Rotates a Quaternion. More... | |
| Mat4 | getMatrix () |
| Gets a Mat4 from the Quaternion. More... | |
Public Attributes | |
| float | w |
| the variables for the Quaternions More... | |
| float | x |
| float | y |
| float | z |
Detailed Description
Contains the Quaternion structure with functions and overloaded operators.
Constructor & Destructor Documentation
◆ Quaternion() [1/3]
|
inline |
Constructs the Quaternion setting the values to 1,0,0,0.
Here is the caller graph for this function:

◆ Quaternion() [2/3]
|
inline |
Constructs the Quaternion setting the values to the input coordinates.
- Parameters
-
w The inputed w position. x The inputed x position. y The inputed y position. z The inputed z position.
◆ Quaternion() [3/3]
|
inline |
Constructs the Quaternion setting the values to the input coordinates.
- Parameters
-
w The inputed w position. x The inputed x position. y The inputed y position. z The inputed z position.
Member Function Documentation
◆ getDotProduct()
|
inline |
Returns the dot product of two Quaternions.
- Parameters
-
Qa One of the Quaternions. Qb One of the Quaternions.
- Returns
- The dot product of two Quaternions.
◆ getLength()
|
inline |
Returns the length of the Quaternion.
- Returns
- The length of the Quaternion.
Here is the caller graph for this function:

◆ getMatrix()
| Mat4 Quaternion::getMatrix | ( | ) |
Gets a Mat4 from the Quaternion.
- Returns
- The a Mat4 from the Quaternion.
Here is the caller graph for this function:

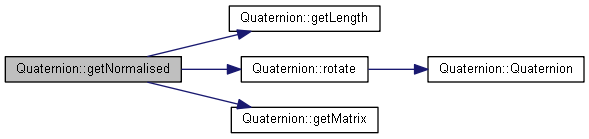
◆ getNormalised()
|
inline |
Returns the normalised version of the Quaternion.
- Returns
- The normalised version of the Quaternion.
Here is the call graph for this function:
◆ rotate()
| void Quaternion::rotate | ( | Quaternion & | quat, |
| Vec3 | axis, | ||
| float | angle | ||
| ) |
Rotates a Quaternion.
- Parameters
-
quat The Quaternion to rotate. axis The axis to rotate. angle The angle of the rotation
- Returns
- The length of the Quaternion.
Here is the call graph for this function:

Here is the caller graph for this function:

Member Data Documentation
◆ w
| float Quaternion::w |
the variables for the Quaternions
◆ x
| float Quaternion::x |
◆ y
| float Quaternion::y |
◆ z
| float Quaternion::z |
The documentation for this struct was generated from the following files:
- LevelHEngine/Maths/Quaternion.h
- LevelHEngine/Maths/Quaternion.cpp