|
Jamie Slowgrove - OOT Assignment 1 - A Mission in Afghanistan
|
|
Jamie Slowgrove - OOT Assignment 1 - A Mission in Afghanistan
|
A namespace to contain utility functions. More...
Functions | |
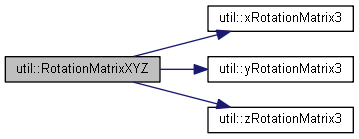
| Ogre::Matrix3 | RotationMatrixXYZ (Ogre::Vector3 &orientation) |
| Ogre::Matrix3 | xRotationMatrix3 (float angle) |
| Ogre::Matrix3 | yRotationMatrix3 (float angle) |
| Ogre::Matrix3 | zRotationMatrix3 (float angle) |
| Ogre::Matrix4 | RotationMatrixXYZW (Ogre::Vector3 &orientation) |
| Ogre::Matrix4 | xRotationMatrix4 (float angle) |
| Ogre::Matrix4 | yRotationMatrix4 (float angle) |
| Ogre::Matrix4 | zRotationMatrix4 (float angle) |
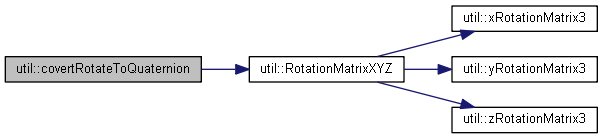
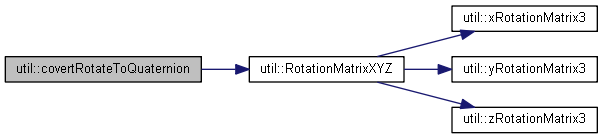
| Ogre::Quaternion | covertRotateToQuaternion (Ogre::Vector3 rotationAxis, float rotateAngle) |
| Ogre::Quaternion | covertRotateToQuaternion (Ogre::Vector3 rotation) |
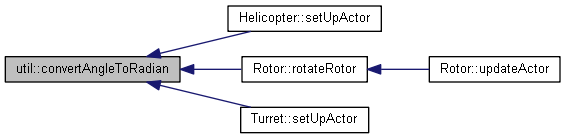
| float | convertAngleToRadian (float angle) |
| float | convertRadianToDegree (float angle) |
| Ogre::Real | angleCheck (Ogre::Real angle, Ogre::Real angleChange) |
| Ogre::Real | getAngleTOA (Ogre::Real opp, Ogre::Real adj) |
| Ogre::Quaternion | aim (Ogre::Vector3 target, Ogre::Vector3 lastTarget, Ogre::Vector3 position, Ogre::Vector3 rotateAxis) |
A namespace to contain utility functions.
| Ogre::Quaternion util::aim | ( | Ogre::Vector3 | target, |
| Ogre::Vector3 | lastTarget, | ||
| Ogre::Vector3 | position, | ||
| Ogre::Vector3 | rotateAxis | ||
| ) |
Work out the aim rotation as a quaternion.
| Ogre::Vector3 | The target position. |
| Ogre::Vector3 | The last target position. |
| Ogre::Vector3 | The position. |
| Ogre::Vector3 | The axis for the rotation. |

| Ogre::Real util::angleCheck | ( | Ogre::Real | angle, |
| Ogre::Real | angleChange | ||
| ) |
Makes sure the angle is between 0 and 360.
| Ogre::Real | The angle. |
| Ogre::Real | The value to add to the angle. |
| float util::convertAngleToRadian | ( | float | angle | ) |
Converts the angle to a radian.
| float | The angle to convert. |
| float util::convertRadianToDegree | ( | float | angle | ) |
Converts the angle from a radian.
| float | The angle to convert. |

| Ogre::Quaternion util::covertRotateToQuaternion | ( | Ogre::Vector3 | rotationAxis, |
| float | rotateAngle | ||
| ) |
Convert the rotation to a quaternion rotation.
| Ogre::Vector3 | The rotation axis of the object. E.g. to rotate on the x rotation axis will be (1.0f,0.0f,0.0f). |
| float | The angle to rotate by. |

| Ogre::Quaternion util::covertRotateToQuaternion | ( | Ogre::Vector3 | rotation | ) |
Convert the rotation to a quaternion rotation.
| Ogre::Vector3 | The rotation of the object. |
| Ogre::Real util::getAngleTOA | ( | Ogre::Real | opp, |
| Ogre::Real | adj | ||
| ) |
Work out the angle using TOA from SOHCAHTOA.
| Ogre::Real | The opposite length. |
| Ogre::Real | The adjacent length. |

| Ogre::Matrix3 util::RotationMatrixXYZ | ( | Ogre::Vector3 & | orientation | ) |
Create a 4x4 rotation matrix.
| Ogre::Vector3 | The orientation of the object. |

| Ogre::Matrix4 util::RotationMatrixXYZW | ( | Ogre::Vector3 & | orientation | ) |
Create a 4x4 rotation matrix.
| Ogre::Vector3 | The orientation of the object. |
| Ogre::Matrix3 util::xRotationMatrix3 | ( | float | angle | ) |
Create a 3x3 rotation matrix for x.
| float | The angle. |

| Ogre::Matrix4 util::xRotationMatrix4 | ( | float | angle | ) |
Create a 4x4 rotation matrix for x.
| float | The angle. |

| Ogre::Matrix3 util::yRotationMatrix3 | ( | float | angle | ) |
Create a 3x3 rotation matrix for y.
| float | The angle. |

| Ogre::Matrix4 util::yRotationMatrix4 | ( | float | angle | ) |
Create a 4x4 rotation matrix for y.
| float | The angle. |

| Ogre::Matrix3 util::zRotationMatrix3 | ( | float | angle | ) |
Create a 3x3 rotation matrix for z.
| float | The angle. |

| Ogre::Matrix4 util::zRotationMatrix4 | ( | float | angle | ) |
Create a 4x4 rotation matrix for z.
| float | The angle. |

 1.8.8
1.8.8

