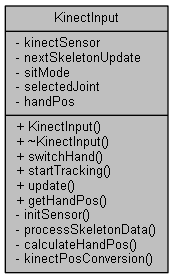
Kinect Input Manager.
More...
#include <Kinect.h>
Kinect Input Manager.
Manages all of the Kinect's initialization, updating and output.
Definition at line 18 of file Kinect.h.
Creates the Kinect Input Manager.
- Parameters
-
| bool | - Enable sitMode for the Kinect |
| TrackingPoint | - Which joint to track |
| KinectInput::~KinectInput |
( |
| ) |
|
| void KinectInput::calculateHandPos |
( |
NUI_SKELETON_DATA |
| ) |
|
|
private |
Calculates the selected hands position.
- Parameters
-
| NUI_SKELETON_DATA | - The skeleton data |
| cgg::Vec3 KinectInput::getHandPos |
( |
| ) |
|
Get the current tracked hand position.
Gives positions in meters. X: -2.2 to 2.2, Y: -1.6 to 1.6, Z: 0.0 to 4.0 (These are Approximate)
- Returns
- cgg::Vec3 - The hand position
| bool KinectInput::initSensor |
( |
| ) |
|
|
private |
Initializes the Kinect Sensor.
- Returns
- bool - Was Kinect initialized
| void KinectInput::kinectPosConversion |
( |
| ) |
|
|
private |
Converts the hand position to usable numbers.
| void KinectInput::processSkeletonData |
( |
| ) |
|
|
private |
Processes a Skeleton.
Fetches the Skeleton and passes it through to calculateHandPos
| bool KinectInput::startTracking |
( |
| ) |
|
Start tracking skeletons.
Must be run to get any skeleton data processed
- Returns
- bool - Was tracking started successfully
Switch which hand the Kinect tracks.
- Parameters
-
| TrackingPoint | - Which joint to track |
| void KinectInput::update |
( |
| ) |
|
Update the Kinect Input Managers Internals.
Checks if there is a skeleton available, if so it calls all the necessary functions to process the skeleton
| cgg::Vec3 KinectInput::handPos |
|
private |
Current position of the selected joint.
Definition at line 31 of file Kinect.h.
| INuiSensor* KinectInput::kinectSensor |
|
private |
Pointer to a Kinect Sensor.
Definition at line 23 of file Kinect.h.
| HANDLE KinectInput::nextSkeletonUpdate |
|
private |
Handle that indicates when a skeleton is ready to process.
Definition at line 25 of file Kinect.h.
| NUI_SKELETON_POSITION_INDEX KinectInput::selectedJoint |
|
private |
Which joint we want the Kinect to track.
Definition at line 29 of file Kinect.h.
| bool KinectInput::sitMode |
|
private |
Whether the Kinect should look for standing or sitting skeletons.
Definition at line 27 of file Kinect.h.
The documentation for this class was generated from the following file:
 1.8.8
1.8.8 
